关键词: 门延迟, D 触发器
门延迟类型
前两节中所介绍的门级电路都是没有延迟的,实际门级电路都是有延迟的。
Verilog 中允许用户使用门延迟,来定义输入到其输出信号的传输延迟。
门延迟类型主要有以下 3 种。
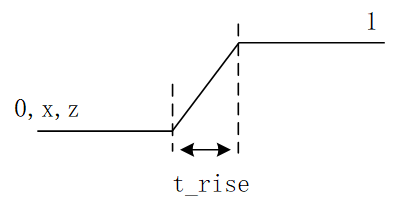
上升延迟
在门的输入发生变化时,门的输出从 0,x,z 变化为 1 所需要的转变时间,称为上升延迟。
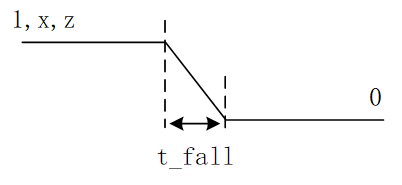
下降延迟
在门的输入发生变化时,门的输出从 1,x,z 变化为 0 所需要的转变时间,称为下降延迟。
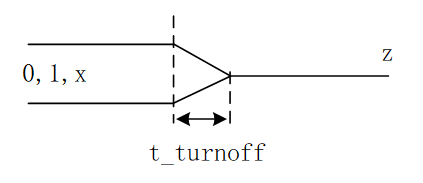
关断延迟
关断延迟是指门的输出从 0,1,x 变化为高阻态 z 所需要的转变时间。
门输出从 0,1,z 变化到 x 所需要的转变时间并没有被明确的定义,但是它所需要的时间可以由其他延迟类型确定,即为以上 3 种延迟值中最小的那个延迟。
门延迟可以在门单元例化时定义,定义格式如下:
gate_type [delay] [instance_name] (signal_list) ;
其中,delay 的个数可以为 0 个、1 个、2 个或 3个 。
下表为不同延迟个数时,各种类型延迟的取值情况说明。
| 延迟类型 | 无延迟 | 1 个延迟 (d) | 2 个延迟 (d1, d2) | 3 个延迟 (d1, d2, d3) |
|---|---|---|---|---|
| 上升 | 0 | d | d1 | d1 |
| 下降 | 0 | d | d2 | d2 |
| 关断 | 0 | d | min(d1, d2) | d3 |
| to_x | 0 | d | min(d1, d2) | min(d1, d2, d3) |
如果用户没有指定延迟值,则默认延迟为 0 。
如果用户指定了 1 个延迟值,则所有类型的延迟值大小均为此值。
如果用户指定了 2 个延迟值,则他们分别代表上升延迟和下降延迟,关断和"to_x"延迟均为这 2 种延迟值中最小的那个。
如果用户指定了 3 个延迟值,则他们分别代表上升延迟、下降延迟和关断延迟,"to_x"延迟为这 3 种延迟值中最小的那个。
带有延迟值的门级单元例化如下:
实例
and #(1) (OUT1, IN1, IN2) ;
//rise delay = 2.1, fall dalay = 2, trun-off delay = 2
or #(2.1, 2) (OUT2, IN1, IN2) ;
//rise delay = 2, fall dalay = 1, trun-off delay = 1.3
bufif0 #(2, 1, 1.3) (OUT3, IN1, CTRL) ;
需要说明的是,多输入门(如与门)和多输出门(如非门)最多只能定义 2 个延迟,因为输出不会是 z 。
三态门和单向开关单路(MOS 管、CMOS 管等)可以定义 3 个延迟。
上下拉门级电路不会有任何的延迟,因为它表示的是一种硬件属性,上下拉状态不会发生变化,且没有输出值。
双向开关(tran)在传输信号时没有延迟,不允许添加延迟定义。
带有控制端的双向开关(tranif1, tranif0)在开关切换的时候,会有开或关的延迟,可以给此类双向开关指定 0 个、1 个或 2 个的延迟,例如:
实例
tranif0 #(1) (inout1, inout2, CTRL);
//turn-on delay = 1, turn-off delay = 1.2
tranif1 #(1, 1.2) (inout3, inout4, CTRL);
最小/典型/最大延迟
由于集成电路制造工艺的差异,实际电路中器件的延迟总会在一定范围内波动。Verilog 中,用户不仅可以指定 3 种类型的门延迟,还可以对每种类型的门延迟指定其最小值、典型值和最大值。在编译或仿真阶段,来选择使用哪一种延迟值,为更切实际的仿真提供了支持。
- 最小值:门单元所具有的最小延迟。
- 典型值:门单元所具有的典型延迟。
- 最大值:门单元所具有的最大延迟。
下面通过例化实例,来说明最小、典型、最大延迟的用法。
实例
and #(1:2:3) (OUT1, IN1, IN2) ;
//上升延迟:最小延迟 1, 典型延迟 2, 最大延迟 3
//下降延迟:最小延迟 3, 典型延迟 4, 最大延迟 5
//关断延迟:最小延迟 min(1,3), 典型延迟 min(2,4), 最大延迟 min(3,5)
or #(1:2:3, 3:4:5) (OUT2, IN1, IN2) ;
//上升延迟:最小延迟 1, 典型延迟 2, 最大延迟 3
//下降延迟:最小延迟 3, 典型延迟 4, 最大延迟 5
//关断延迟:最小延迟 2, 典型延迟 3, 最大延迟 4
bufif0 #(1:2:3, 3:4:5, 2:3:4) (OUT3, IN1, CTRL) ;
D 触发器
下面从门级建模的角度,对 D 触发器进行设计。
SR 触发器
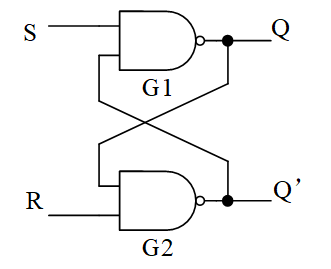
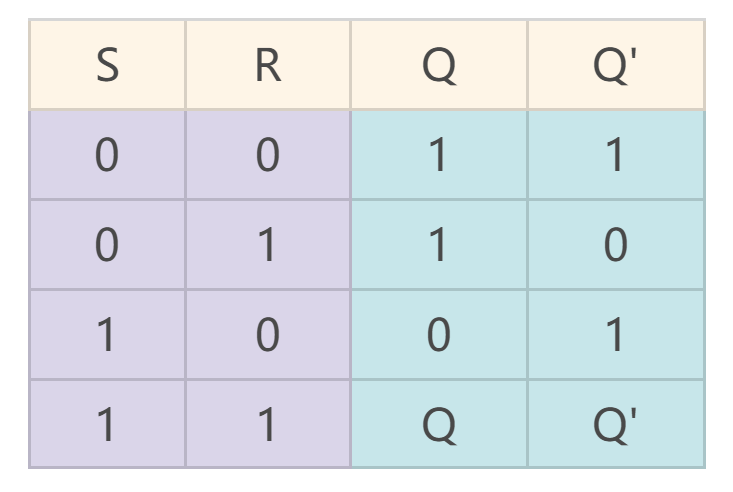
SR 触发器结构图及真值表如下所示。
- 1、当 S 为低电平,G1 输出端 Q 为高电平,并反馈到 G2 输入端。如果此时 R 为高电平,则 G2 输出端 Q' 为低电平。
- 2、R 为低电平 S 为高电平时,分析同理。
- 3、S 与 R 均为高电平时,如果 Q = 1 (Q' = 0) , 则 Q 反馈到 G2 输入端后输出 Q' 仍然为 0, Q' 反馈到 G1 输入端后输出 Q 仍然是 1,呈现稳态。如果 Q =0 (Q' = 1) 同理,Q 与 Q' 的值仍然会保持不变。即 S 与 R 均为高电平时该电路具有保持的功能。
- 4、如果 S 与 R 均为低电平,则输出 Q 与 Q' 均为高电平,不再成互补的关系。所以此种情况是禁止出现的。
SR 锁存器
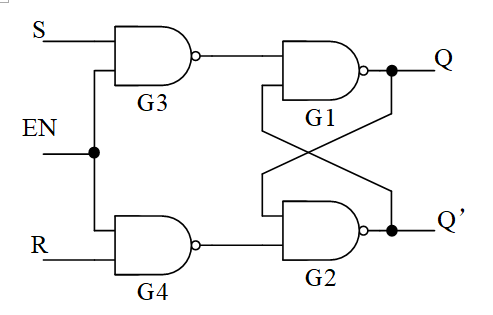
在基本的 SR 触发器前面增加 2 个与非门,可构成带有控制端 SR 锁存器。
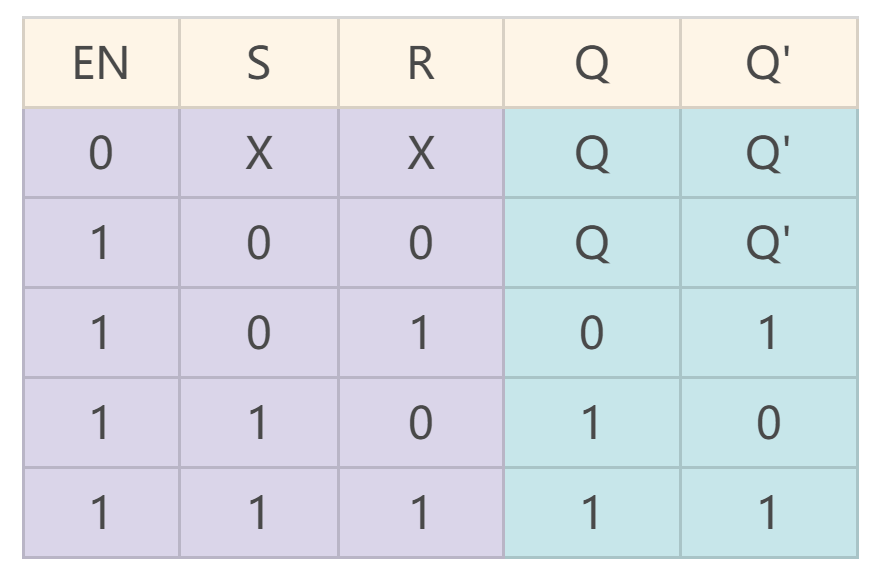
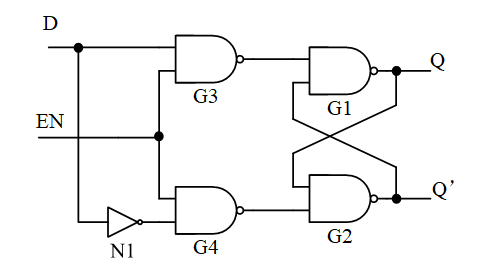
SR 锁存器及其真值表如下所示。
- 当 EN=0 时,G3、G4 截止,SR 锁存器保持输出状态不变。
- 当 EN=1 时,与基本的 SR 触发器工作原理完全相同。
D 锁存器
基本的 SR 触发器输入端不能同时为 0, 带有控制端的 SR 锁存器输入端不能同时为 1,否则会导致输出端 Q 与 Q' 的非互补性矛盾。
为消除此种不允许的状态,在带有控制端的 SR 锁存器结构中加入取反模块,保证 2 个输入端均为相反逻辑,则形成了 D 锁存器。
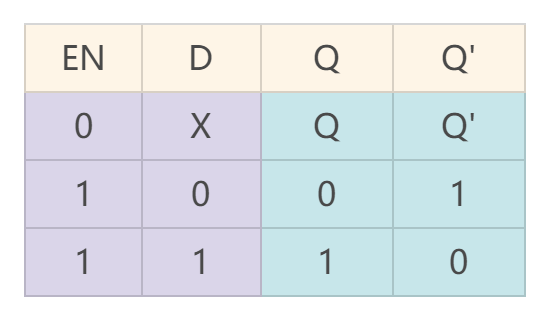
其结构图和真值表如下所示。
- 1、当 EN=1 时,输出状态随输入状态的改变而改变。
- 2、当 EN=0 时,输出状态保持不变。
D 锁存器是一种电平触发。
如果在 EN=1 的有效时间内,D 端信号发生多次翻转,则输出端 Q 也会发生多次翻转。这降低了电路的抗干扰能力,不是实际所需求的安全电路。
为提高触发器的可靠性,增强电路抗干扰能力,发明了在特定时刻锁存信号的 D 触发器。
D 触发器
将两个 D 锁存器进行级联,时钟取反,便构成了一种简单的 D 触发器,又名 Flip-flop。
其结构图和真值表如下所示。
第一级 D 锁存器又称为主锁存器,在 CP 为低电平时锁存。第二级 D 锁存器又称为从锁存器,时钟较主锁存器相反,在 CP 为高电平时锁存。
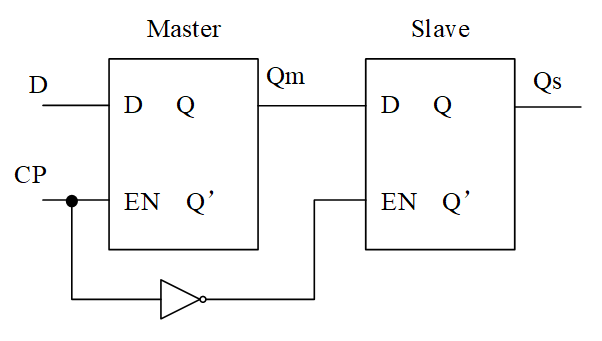
- 1、CP=1 时,主锁存器输出端 Qm 会和 D 端信号的变化保持一致,而从锁存器处于保持状态,输出 Qs 保持不变。
- 2、CP由高电平变为低电平时,主锁存器锁存当前 D 的状态,传递到输出端 Qm 并保持不变。而从锁存器输出端 Qs 会和 Qm 的变化保持一致。此时处于锁存状态下的主锁存器输出端 Qm 会保持不变,所以 D 触发器输出端 Qs 端得到新的 Qm 值后, 也会保持不变。
综上所述,D 触发器输出端 Qs 只会在时钟 CP 下降沿对 D 端进行信号的锁存,其余时间输出端信号具有保持的功能。
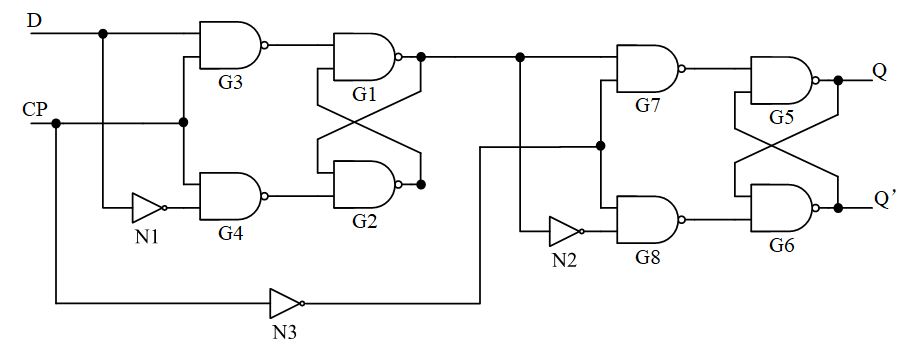
将双级 D 锁存器展开为门级结构,如下图所示。
对 D 触发进行门级建模,并加入门级延时,verilog 模型如下:
实例
input D, CP,
output Q, QR);
parameter RISE_TIME = 0.11 ;
parameter FALL_TIME = 0.07 ;
//part1, not gate
wire CPN, DN ;
not #(RISE_TIME, FALL_TIME) (CPN, CP);
not #(RISE_TIME, FALL_TIME) (DN, D);
//part2, master trigger
wire G3O, G4O ;
nand #(RISE_TIME, FALL_TIME) (G3O, D, CP);
nand #(RISE_TIME, FALL_TIME) (G4O, DN, CP);
wire #(RISE_TIME, FALL_TIME) G1O, G2O ;
nand #(RISE_TIME, FALL_TIME) (G1O, G3O, G2O);
nand #(RISE_TIME, FALL_TIME) (G2O, G4O, G1O);
//part3, slave trigger
wire G7O, G8O ;
nand #(RISE_TIME, FALL_TIME) (G7O, G1O, CPN);
nand #(RISE_TIME, FALL_TIME) (G8O, G2O, CPN);
wire G5O, G6O ;
nand #(RISE_TIME, FALL_TIME) (G5O, G7O, G6O);
nand #(RISE_TIME, FALL_TIME) (G6O, G8O, G5O);
assign Q = G5O ;
assign QR = G6O ;
endmodule
testbench 编写如下:
实例
module test ;
reg D, CP = 0 ;
wire Q, QR ;
always #5 CP = ~CP ;
initial begin
D = 0 ;
#12 D = 1 ;
#10 D = 0 ;
#14 D = 1 ;
#3 D = 0 ;
#18 D = 0 ;
end
D_TRI u_d_trigger(
.D (D),
.CP (CP),
.Q (Q),
.QR (QR));
initial begin
forever begin
#100;
//$display("---gyc---%d", $time);
if ($time >= 1000) begin
$finish ;
end
end
end
endmodule // test
仿真结果如下。
由图可知,Q/QR 信号均在时钟 CP 下降沿采集到了 D 端信号,并在单周期内保持不变,且输出有延迟。

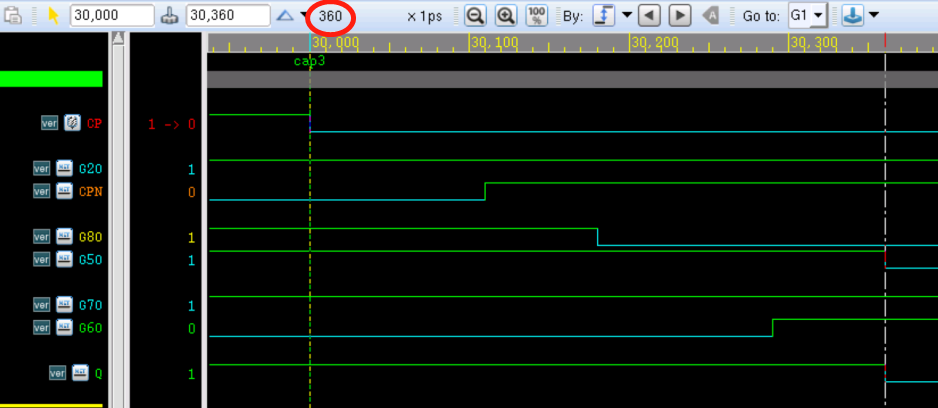
对 cap3 时刻进行放大,对延时进行追踪,如下图所示。
- CP 端到 CPN 端有上升延迟,时间为 110ps;
- CPN 端到 G8O 端有下降延迟,时间为 70ps;
- G8O 端到 G6O 端有上升延迟,时间为 110ps;
- G6O 端到 Q 端有下降延迟,时间为 70ps;
- 共 360ps,符合设置的门延迟。